


MAGDRONE
Le MagDrone R3 est un magnétomètre composé de deux capteurs triaxiaux destiné à être embarqué sur un drone supportant une charge utile de 800 g minimum.
Le kit est composé d’un tube ultra léger intégrant deux capteurs triaxiaux, une unité d’acquisition et une mémoire interne pour l’enregistrement des données, une batterie rechargeable et un récepteur GNSS. Il a été conçu pour être embarqué sur des drones de petites à moyennes tailles tout en permettant des longueurs de vols accrues du fait de sa légèreté.*
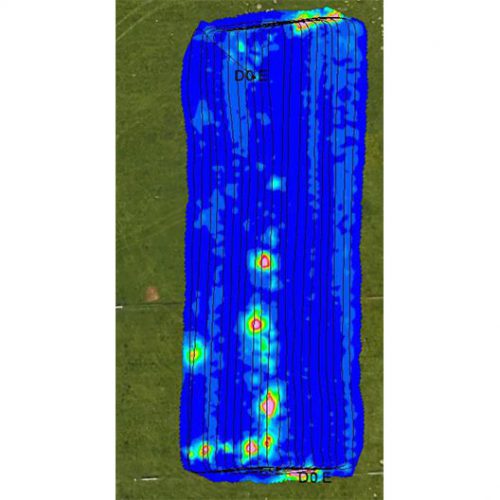
Selon les capacités du drone en termes de maniabilité et de précision de positionnement (X,Y,Z), le capteur MagDrone peut être utilisé pour réaliser des cartographies magnétiques pour l’exploration minière, l’archéologie, ou la détection de munition.
Il se fixe facilement sur un drone avec ces multiples systèmes de fixation. Le capteur est seulement équipé d’un bouton marche/arrêt. Une fois lancé, il mesure et enregistre en continu. L’export des données permet de récupérer les valeurs des 3 axes sur les 2 capteurs.
Il est possible de louer le capteur Magdrone + drone / télépilote.
Description
Caractéristiques techniques
Alimentation : 11.1 V, 1950 mAh, batterie Li-Ion rechargeable.
Autonomie : environ 3h.
Poids : 700 g ; 820 g (batterie incluse).
Dimensions :du tube : 1070x22mm.
Mémoire interne : 16 Go.
Capteurs FGM3D/75
Champ ambiant max : 75,000 nT.
Gamme de mesure : +/- 30,000 nT.
Résolution : 0.075 nT à 0.3 nT.
Espacement entre les 2 capteurs : 1000 mm.
Échantillonnage : 200 Hz.
Positionnement
Récepteur GNSS (GPS, GLONASS) type Ublox : 1.0/1.5m de précision, 5Hz.
Horodatage des mesures (5ms).
Fabricant : Sensys (Allemagne).
Élément du kit
Capteur MagDrone R3 (2 magnétomètres triaxiaux, unité d’acquisition, récepteur GNSS).
Magdrone Data Tool.
Logiciels de traitement
Magdrone Data Tool (pré-traitement).
Magneto Arch ou UXO.
Le logiciel de traitement Magdrone Data Tool permet de réaliser les premières étapes de traitement sur les données enregistrées, notamment sur la trajectoire (détection du sens des passages, superposition, points statiques) et sur les valeurs mesurées (filtrage, compensation médiane). Les données sont ensuite exportées en ASCII ou au format du logiciel de traitement Magneto.



